前回のエントリのコメントで、せろおさんから「三脚ネジ穴つけられないの?」「みっちりボディの中身をのぞいてみたい」というご要望をいただきました。今回は、そのご要望にお応えするだけのエントリ。
まずはネジ穴の写真から。ボディの中央下底面に見える真鍮が三脚穴。幅に余裕がなくて、ちょっとはみ出してしまったけれど、ボディの体積をほぼ変えることなく、ねじ穴を取り付けられた。結果、スマホホルダーは不要になった。ありがとう、せろおさん! あわせてレンズ周りに同心円状の起伏をつけてみた。これは、見てくれの飾りでもあるけれど、レンズより起伏の方を高くしているので、レンズ保護の役割も果たすようにしたんだ。

ちなみに、ビフォーの写真はこちら。

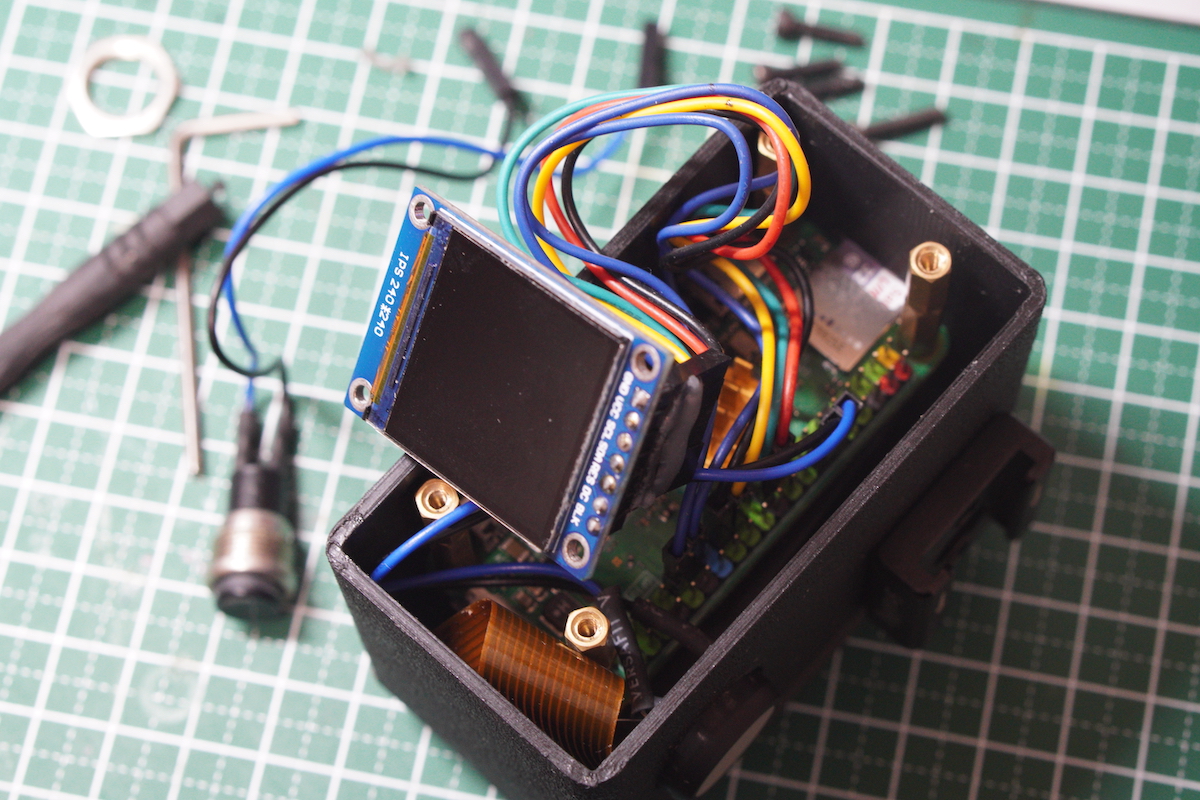
次いで、リクエストのあったみっちりボディの中身をチラ見せ。青い線を切断したら爆発する時限爆弾じゃないよ。ディスプレイからは6本の線が伸びていて、この子が結構かさばっている。普通のリード線を使って工作すれば短くもできたんだけれど、その後の分解・再利用を考えてジャンパーワイヤでつないでいるので長くなってる。それがなければ、もう少し体積は減らせたかも。効果は不明だけれど、一応、ヒートシンクも載せてあります。
ハード的には、一応、これで完成したんだと思う。ソフトウエア的にも基本的な部分は出来ているので、ZERO WのパワーでもPlate Solvingできる適切な画像の大きさを探りたいのと、細かい部分の作り込みをする作業が残っている。このお天気だから、実際の空で試せないのが痛いなぁ。
きょうは4B版を作るかね。ソフトウエア的にはほぼ同じだし。
この記事へのコメント
>きょうは4B版を作るかね。
天気もそう言ってるよね。^^
ということで、久しぶりに秋葉原にお出かけ^^
いや2週間ぶりか…
あれ、先週行ったかな…
こちらはV3カメラですか。V3のIMX708とHQのIMX477では、スペックが比較的近いこともあって写りがどう違うかとても興味があります(^^)。
V3はオートフォーカス対応なのが良いです! HDRやBinningもできるので、暗所にもある程度対応できそうです。ただ、ZEROに処理させるのが重いので、B4で試すことになりそうです。あと、公式からではないのですが、MIPIのIMX385がパーツとして出ていますよ。こちらも興味津々^^
え、HDRやBinningの設定もラズパイからできるのですか。いやー、知らない間に世の中進んでいますねぇ・・
あとIMX385のボード、見てみたら確かにAliexpressにありますね。知りませんでした。これはそそられます。
進んでますよね! モード設定というのがlibcamera-still にあって、
–mode 1640:1232:10 というモード4のオプションをつけたら
4:3のアスペクト比でビニングを発動してくれます。
HDRも –hdr をつけるだけでした。らくちん!
素人考えでテキトーなことを言っただけでしたが、
改良の手がかりになって良かったです。
レンズ周りのデザインもよりカメラっぽくなってかっちょいいです。
中身は想像していたよりはウネウネしていないけど、
不器用な自分では配線できそうもないです。
nano1のことを思い出してきました・・・
同じくらいのサイズでさらに多くのことができるようになったのですね。
いやいや、ありがとうございました^^
nano1って、当時唯一Cマウントのレンズがデフォで使えるカメラだったというのもあって、興奮していたんですが、何がそんなに天体専用だったのかよくわからないうちにプロジェクトが終わってしまいました(汗)
なるほど、この星空カメラがnano1の後継的な位置づけと考えたら、用途が広がりそうです。考えてみよう〜っと